Desmitificación de los propulsores acimutales: navegación marítima al principio
Anteriormente, en el artículo «Componentes del sistema DP - Propulsores», hablamos de los distintos tipos de propulsores. Los sistemas de posicionamiento dinámico (DP) mantienen la posición y el rumbo de un buque o unidad flotante en alta mar mediante propulsores, sin necesidad de anclas. Los propulsores desempeñan un papel crucial en los sistemas de posicionamiento dinámico, ya que proporcionan el empuje necesario para controlar la posición y el rumbo.
El propulsor acimutal es capaz de girar 360 grados. Al poder desarrollar el empuje en cualquier dirección, un buque con propulsores azimutales tiene buenas características de maniobra. Los propulsores azimutales pueden ser tanto auxiliares como fuente principal de desarrollo del empuje, y pueden tener hélices de paso fijo o de paso controlable.
La vaina suele estar situada por debajo de la línea de flotación y puede girar mediante un motor hidráulico o eléctrico.
Al tener la capacidad de rotar el vector de empuje, los buques equipados con propulsores acimutales pueden cambiar de dirección de movimiento rápida y fácilmente, lo que los hace muy maniobrables. Esto los hace especialmente útiles para remolcadores, buques de suministro en alta mar y sistemas de posicionamiento dinámico para mantener la posición de estructuras flotantes.
El tamaño y la potencia de los propulsores acimutales pueden variar en función de la aplicación específica y del tamaño del buque. Suelen ser de accionamiento eléctrico o mecánico y su potencia puede oscilar entre unos cientos de kilovatios y varios megavatios.
Pero a veces las tareas específicas requieren limitar el sector de rotación del propulsor azimutal. Para ello existen varios modos disponibles en el Sistema DP.
La función Azimut Fijo puede utilizarse cuando es necesario fijar la fuerza del propulsor en una dirección determinada. Esta función se utilizará cuando el buque tenga un propulsor acimutal situado en la línea central de proa y popa, normalmente más cerca de la proa que del centro del buque, y destinado a actuar contra la principal fuerza ambiental, dependiendo de cuál sea más fuerte en ese momento: el viento, la corriente o su interacción. Así, un propulsor acimutal de este tipo soporta la carga principal, mientras que los demás se limitan a corregir la posición del buque con la mínima.
Aunque son fijos, los propulsores acimutales no proporcionan al buque tanta maniobrabilidad como los propulsores acimutales totalmente orientables. Pero siguen siendo sistemas de propulsión valiosos en determinadas aplicaciones, ya que proporcionan empuje adicional y capacidad de maniobra para mejorar el control del buque en direcciones específicas.
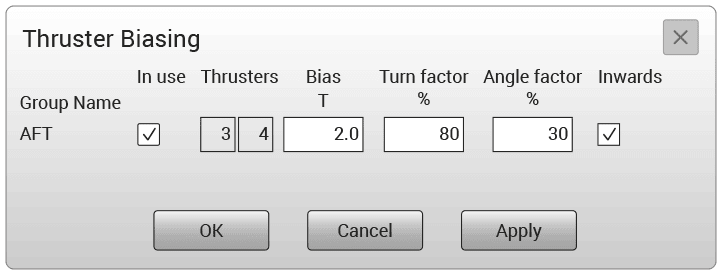
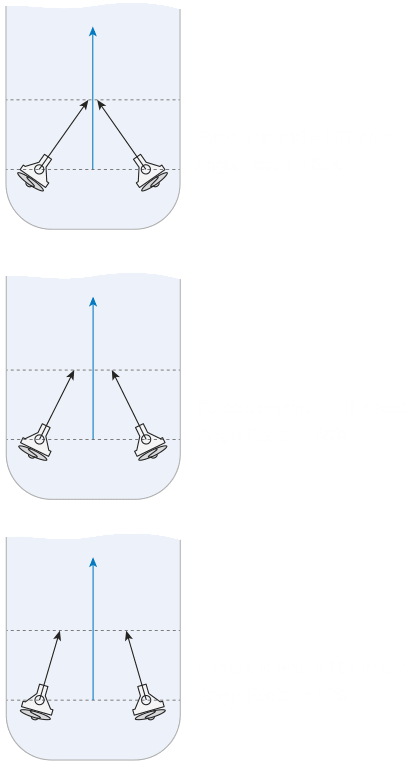
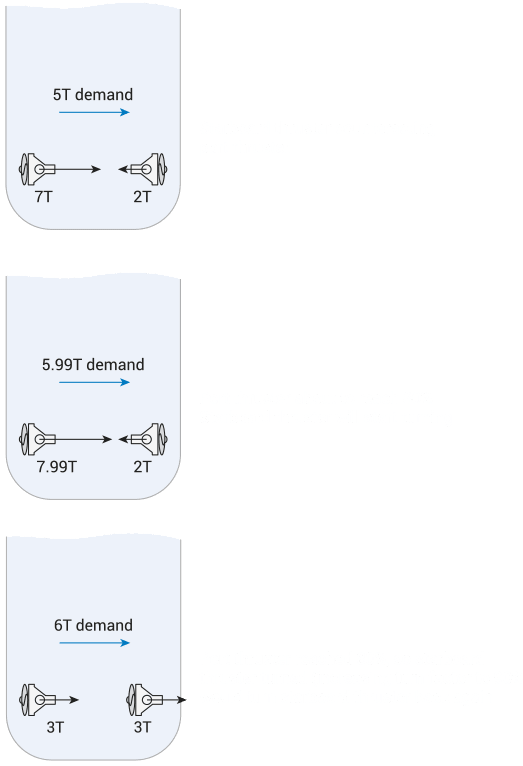
El modo de polarización es un modo en el que dos propulsores acimutales trabajan compensándose entre sí (en direcciones opuestas); por ejemplo, se utiliza en condiciones ambientales ligeras para evitar el giro constante de los propulsores (búsqueda de una dirección). La polarización de los propulsores tiene tres parámetros principales: carga mínima, en la que los propulsores azimutales trabajan uno contra el otro (contrarrestan); sector de trabajo de los propulsores azimutales (factor de ángulo) y porcentaje de carga de los propulsores azimutales, cuando salen del «modo polarizado» y empiezan a trabajar en la misma dirección, compartiendo la demanda de carga (factor de giro). En la condición neutral, por lo tanto, dos propulsores trabajan en la dirección opuesta con la carga de potencia, fijada por el operador. Para proporcionar una dirección sostenida de movimiento hacia delante o hacia atrás, ambos propulsores acimutales pivotan dentro del sector predeterminado, de modo que se desarrolla el vector lineal de suma, mientras que los vectores laterales se compensan entre sí. Pueden aumentar la fuerza haciendo que el buque se mueva más rápido, pero no pueden disminuirla por debajo del nivel, fijado por el operador. Para proporcionar movimiento a babor o estribor, un propulsor azimutal desarrolla más fuerza que el otro.
El factor de Giro determina cuando girar un propulsor dentro de un grupo, en lugar de continuar contrarrestando al otro propulsor. La fuerza máxima para cada propulsor es de 10 tonos y la fuerza de ralentí o de polarización es de 2 tonos.
El factor de ángulo determina la prioridad relativa del ángulo frente a la fuerza para satisfacer la demanda de fuerza. Se consigue la misma demanda de 10 tonos por delante, pero se utiliza más empuje con un factor de ángulo mayor, que con un factor de ángulo menor.