Como el sistema DP se instala a bordo de un buque, se habla de «buque posicionado dinámicamente» (buque DP).
Hay que subrayar que se hace mediante propulsores (es decir, sistema de propulsión); no velas, remos o anclas: ¡sólo sistema de propulsión!
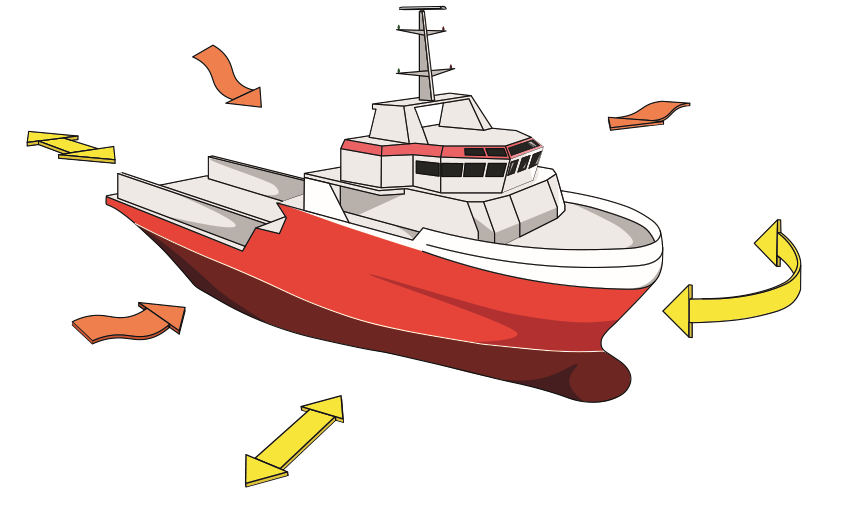
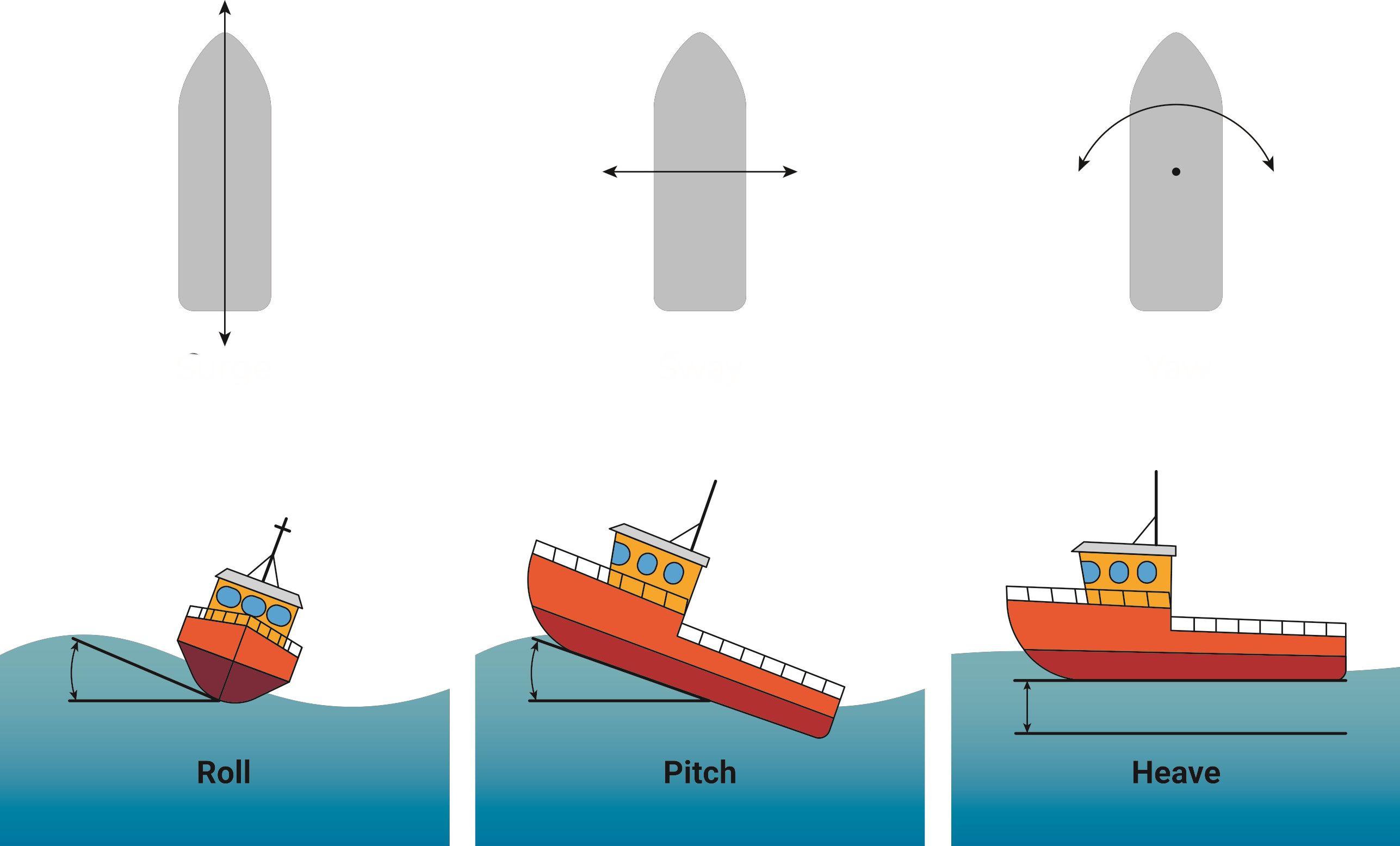
El viento, las olas y la corriente afectan constantemente a un buque, haciéndolo derivar, virar o escorarse. Así, el buque puede tener seis ejes de libertad: oleaje, balanceo, guiñada, cabeceo, balanceo y escora. Conviene aprenderlos de una vez, recordarlos siempre y no confundirlos nunca.
Marejada - movimiento de un buque hacia delante y hacia atrás.
Balanceo: movimiento lateral de un buque a babor o estribor.
Yaw - rotación de un buque en el plano horizontal, cambio de rumbo.
Cabeceo: movimiento hacia arriba y hacia abajo de la proa y la popa de un buque.
Balanceo - movimiento de inclinación de babor a estribor de un buque.
Balanceo - movimiento vertical de un buque hacia arriba y hacia abajo.
El sistema DP sólo es capaz de controlar tres ejes: oleaje, balanceo y guiñada. Para ello, el sistema necesita obtener el valor de las fuerzas que influyen en el buque, las coordenadas de su posición actual y el rumbo. En esta fase intervienen sensores y sistemas de referencia de posición. Los girocompases suministran datos sobre el rumbo del buque al sistema DP. Una de las fuerzas ambientales que es posible medir es la fuerza del viento. La influencia de las olas y la corriente se calcula mediante la modelización matemática del sistema DP y se denomina corriente DP.
El Sistema de Referencia de Posición (PRS) proporciona al sistema DP los datos sobre las coordenadas de posición del buque. Normalmente hay dos o más PRS, por eso sus datos se introducen en un punto, llamado Centro de Rotación. Sin embargo, durante la mar agitada, la antena o unidad de escaneo del PRS se desplaza junto con el buque, indicando continuamente los datos de su posición en el sistema de coordenadas. Para corregir los datos introducidos por los sistemas de referencia, el sistema DP necesita medir el balanceo y el cabeceo del buque. El sensor de referencia vertical (VRS) mide los valores angulares de balanceo y cabeceo y envía estos datos al sistema DP.
En resumen, el Posicionamiento Dinámico es el mantenimiento automático de la posición y el rumbo mediante el sistema de propulsión del buque (propulsores). Hay que destacar la palabra rumbo, ya que la palabra posicionamiento se asocia con el significado de «posición», es decir, latitud y longitud. En el contexto de la AD, la posición automática (AutoPos) consiste en mantener tanto la posición como el rumbo del buque.

