
Vertical Reference Sensor (VRS) or Motion Reference Unit (MRU) – is a sensor, enabling the DP system to measure deviation angles of the vessel in relation to her vertical position. The difference is that VRS is a previous generation sensor, measuring Pitch and Roll only. MRU – is a modern one and is able to measure Pitch, Roll and Heave.
Even though the MRU sensors are fitted on board, on the DP console corresponding button can have ‘VRS’ designation. It does not matter, though, because the most important thing is their function. Both VRS and MRU can be called as ‘a motion sensor’, and its core is to measure deviation angle in relation to the vertical position – the term vertical reference comes from it. The DP system is provided with the information on deviation angle during rolling and pitching in order to apply correction to position reference systems data.
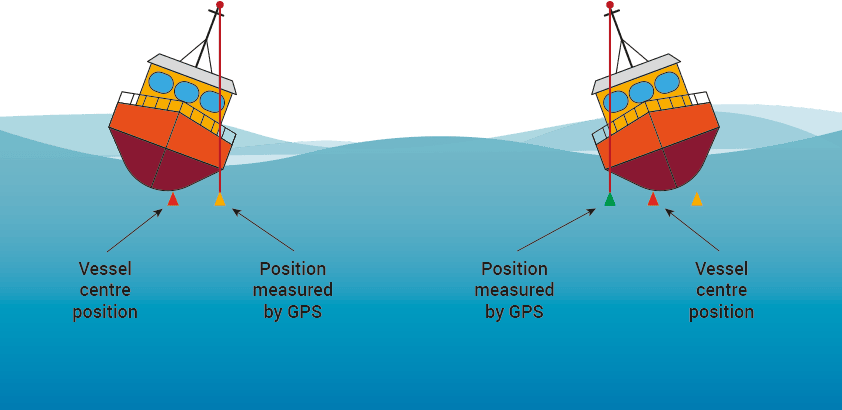
Take an example of the DGPS antenna when the vessel is in her vertical position, projection of the antenna’s position on the coordinate system corresponds to the vessel’s position. When the vessel heels, the antenna still transmits information about its position, however it does not correspond to the real position of the vessel. To improve accuracy in position fixing, the DP system applies correction to the position of antennas or sensitive elements of the reference systems, basing on the data fed by VRS/MRU.
On the basis of the information fed by the Wind sensor and data on the above-water part of the vessel, the DP system creates Wind Model. The correctness of the Wind Model depends on the accuracy of the wind measurement – if the sensor is sheltered from the wind by a mast or a platform, it will provide incorrect data that will lead to misreckoning. The DP system will continue to keep the position of the vessel with the incorrect Wind Model, as well as to keep the position, if the Wind Sensor is switched off at all. In that case, wind force affecting the vessel will be fed to the DP Current along with the sea current and wave action, as an unknown external force.

The question may arise, why do we talk about importance of the Wind sensor, if the DP system is able to work without it? Before answering this question and look at the other situations with the Wind sensor, it is necessary to review the concept of Wind Feed Forward – the ability of the DP system to react quickly to the wind gust, developing the counteracting force.
In order to calculate hydrodynamic model of the vessel, the DP system requires thirty minutes (in theory), i.e. all information from the sensors and position reference systems is fed to the DP system, calculations are made, and as a result, the vessel keeps her position. Sometimes there is a sudden gust of the wind or a change of the wind direction, and the system still requires some time to calculate the model. To avoid loss of the position due to wind gusts, there is a function Wind Feed Forward in the DP system. As soon as the Wind sensor provides the data on a sudden wind change, the DP system sends the signal directly to the thrusters to develop counter thrust bypassing mathematic modelling. Thus, loss of the vessel’s position will be minimum. If the gale is long lasting, the DP system will calculate hydrodynamic model of the vessel in accordance with these environmental conditions.
Answering the question above: the DP system is able to function without any information on the wind. In that case, the DP Current will include this force, along with the rest unknown external forces affecting the vessel. However, Wind Feed Forward requires operational Wind sensor. Now, when the idea of the Wind Feed Forward function is clear, it is necessary to mention that such characteristic of the DP system shall be considered during helicopter operations, as the air flow from the propeller blades may hit the Wind sensor, the DP system will take it for the gust and develop the thrust. It is clear that no forces are affecting the vessel and she will move away from the position. If the vessel is near the rig or platform, it may result in collision. That is why Wind sensors in the DP system are switched off during helicopter operations.
Another disadvantage of the Wind Feed Forward function needed to be considered is when Wind sensors in the mast are measuring full wind while the vessels hull is in sheltered area. This gives over-compensation from the DP system and as a result the positioning will be unstable. Such vessel behavior can be solved by disabling all Wind sensors. In this case, DP system will use the average data from the last enabled Wind sensor.
